

 QQ
QQ
F7450:静态监控已响应,驱动在静态监控时间进程结束后超出静态窗口。
F7451:跟随误差过大, 位置设定值和位置实际值的差值(跟随误差动态模式)大于公差。
F7452:定位监控已响应,驱动在定位监控时间进程结束时仍未到达定位窗口。
导致以上问题的原因多半是因为没有对于相应的机械设备进行伺服驱动器的优化,造成伺服电机没有发挥出卓越的性能。
伺服系统组成

图1:伺服系统组成
SINAMICS V90 PN 伺服驱动由三个控制环组成:
电流控制
系统内部根据已知的电机绕组数据等信息自动计算电流环增益。
速度控制
速度环为PI调节器,速度环增益直接影响速度环的动态响应,通过将积分分量加入速度环以提高系统抗干扰特性,消除速度的稳态误差,如果负载惯量比较高,那么需要相应增大速度环积分时间常数,否则,机械系统可能会因此产生谐振。
位置控制
位置环为P调节器,位置环增益直接影响位置环的动态响应,增益设置不合适会导致定位过冲或跟随误差过大,当然可以通过增加合适的速度环预控以大幅度降低跟随误差。在具有多个机械传递环节的系统中,位置环增益往往被*低固有频率的传递环节所限制。
一键自动优化功能
为方便大家调试,SINAMICS V90驱动器提供了一键自动优化功能,通过此功能可以使设备获得更高的动态性能:
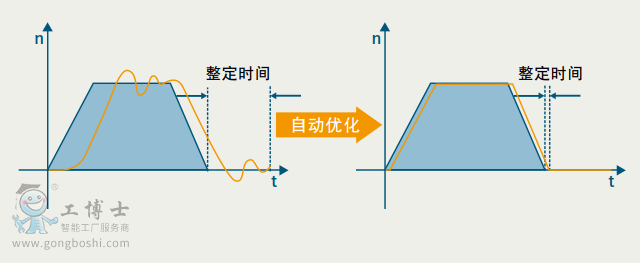
图2:一键自动优化
通过V-ASSISTANT调试软件进行一键自动优化参数配置,必须具备的前提条件:
· 确认电机允许正反转。
· 确认电机轴转动的角度范围。
– 对于带**值编码器的电机:允许电机旋转角度限制由 p29027 决定(*小设置为180°) 。
– 对于带增量式编码器的电机:p29027必须大于两圈的自由旋转。(*小设置为720°)

图3:一键自动优化配置

图4:一键自动优化高级参数配置
下面通过实验比对一键自动优化对于伺服系统动态性能的影响:

图5:未激活速度与转矩前馈以及未进行优化

图6:激活速度与转矩前馈并且优化后的结果
通过合理的配置,在进行一键自动优化后,系统根据传动系统与机械系统自动整定出合适的参数以获得相应的动态响应。当然,如果机械系统的特性非常差,比如刚度不足会导致无法通过一键自动优化,这种情况下,需要大家根据设备的实际运行状态手动整定参数
